Labyrinth-Robots
Ähnlich wie Mr.Coco
basiert Labyrinth-Robots, eine Anwendung für für
zwei mobile Roboter, auf einem Line-Following-Algorithmus:
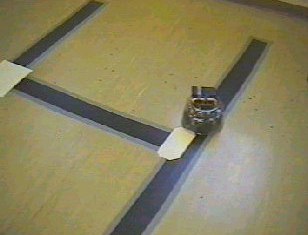
Ein (kreisfreies) Labyrinth ist mit Klebebändern am Boden aufgezeichnet.
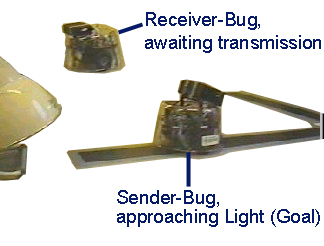
Einer der beiden Roboter (Sender-Bug, Pionier-Robot) fährt als erster durch
das Labyrinth, erkennt Kreuzungstypen und merkt sich den Weg in einer Karte.
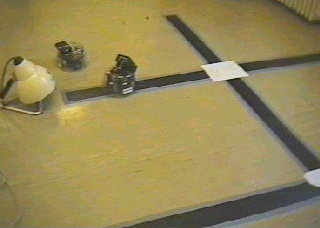
Der Ausgang des Labyrinthes ist durch eine Lichtquelle markiert. Wird der Ausgang
vom Pionier-Robot gefunden, berechnet dieser den kürzesten Weg durch das
Labyrinth und sendet diesen per Morse-Code und Funk an den noch wartenden zweiten
Robot (Receiver-Bug, Follower-Robot). Dieser kann bequem die richtigen Abzweigungen
an den Kreuzungen nehmen und erreicht das Ziel am besten Weg.
Zwei PIO-Plattformen bilden die Hardware-Basis für dieses Roboter-Experiment. Die Programmierung erfolgte in C.